products
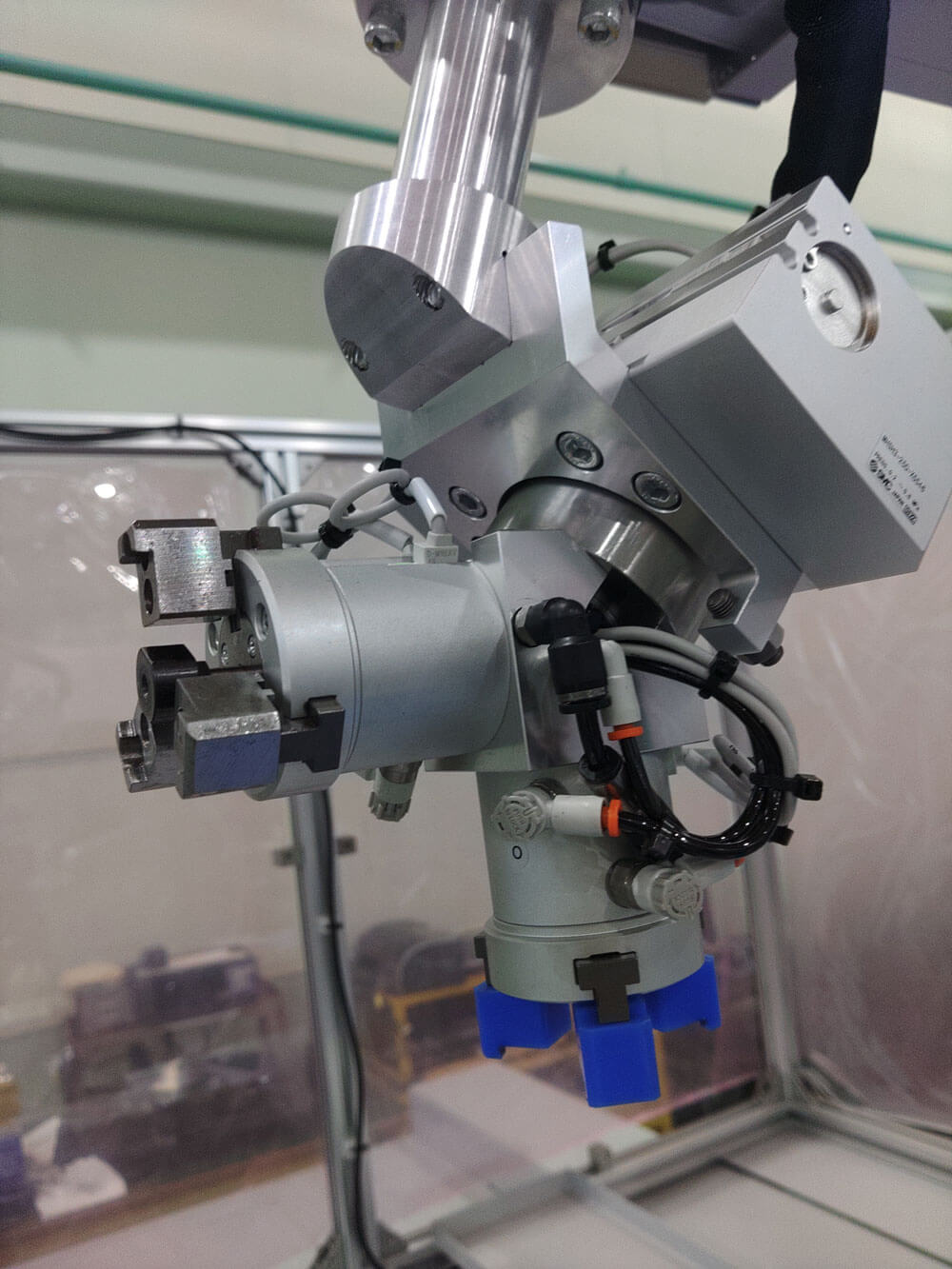
NUCROBO-101ロボットタイプ(垂直多関節ロボット)
products
NUCROBO-101

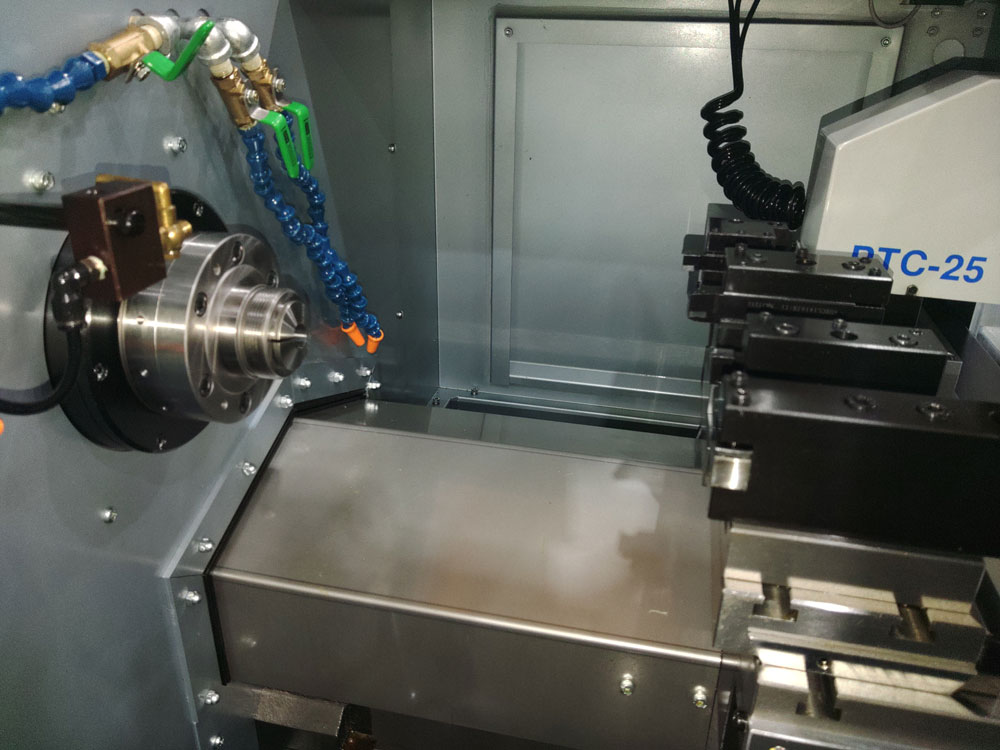


エグロロボットシステムのベーシックタイプ
安定した位置決め精度
X軸には分解能0.05㎛の光学スケールを搭載したクローズドループ仕様
コールドスタートからでも2㎛以下の安定した加工精度
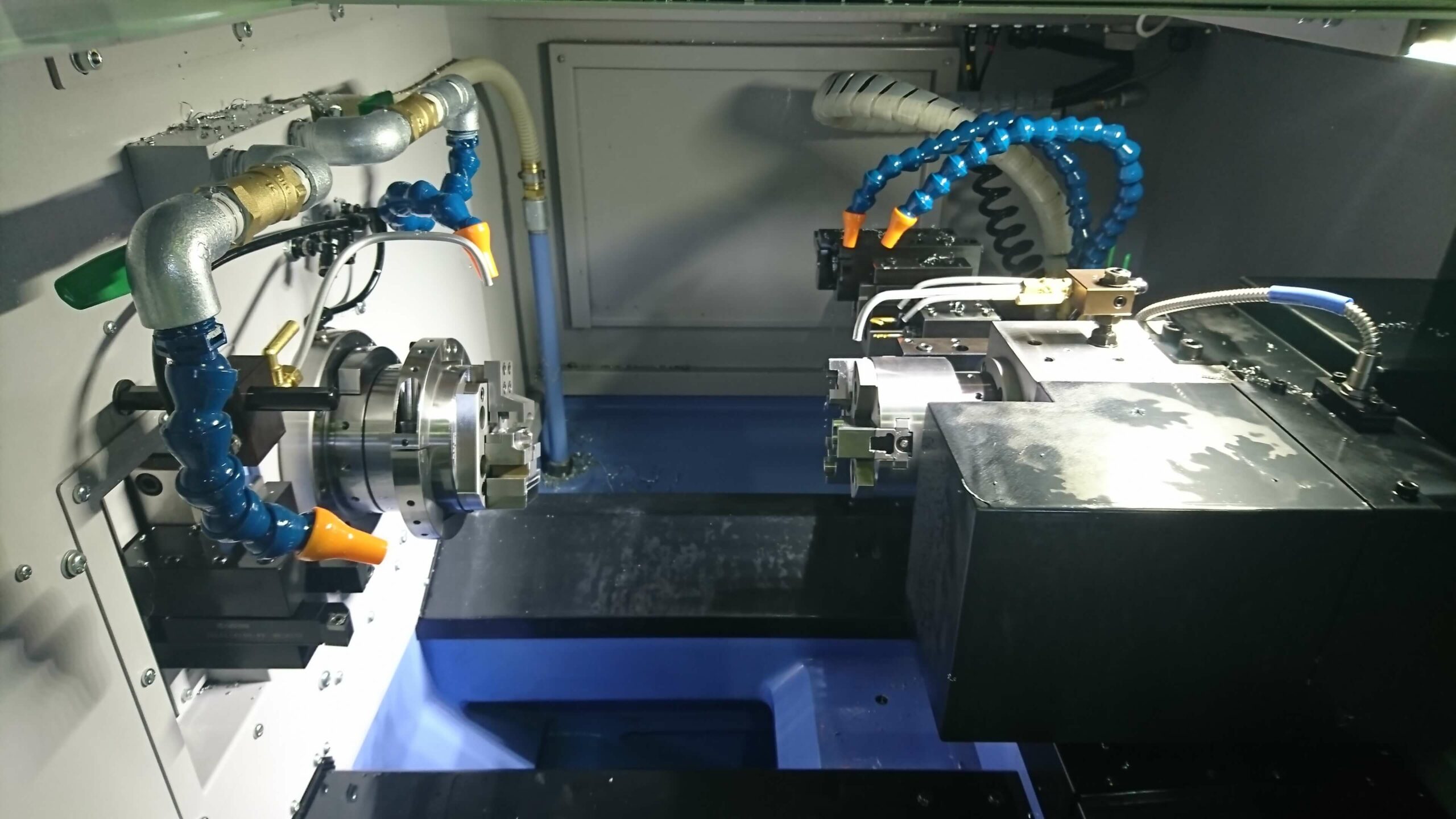
豊富なオプション
ストロークサイズ・主軸回転数等が選べるオプションが充実
加工用途に合わせた専用オプションも豊富
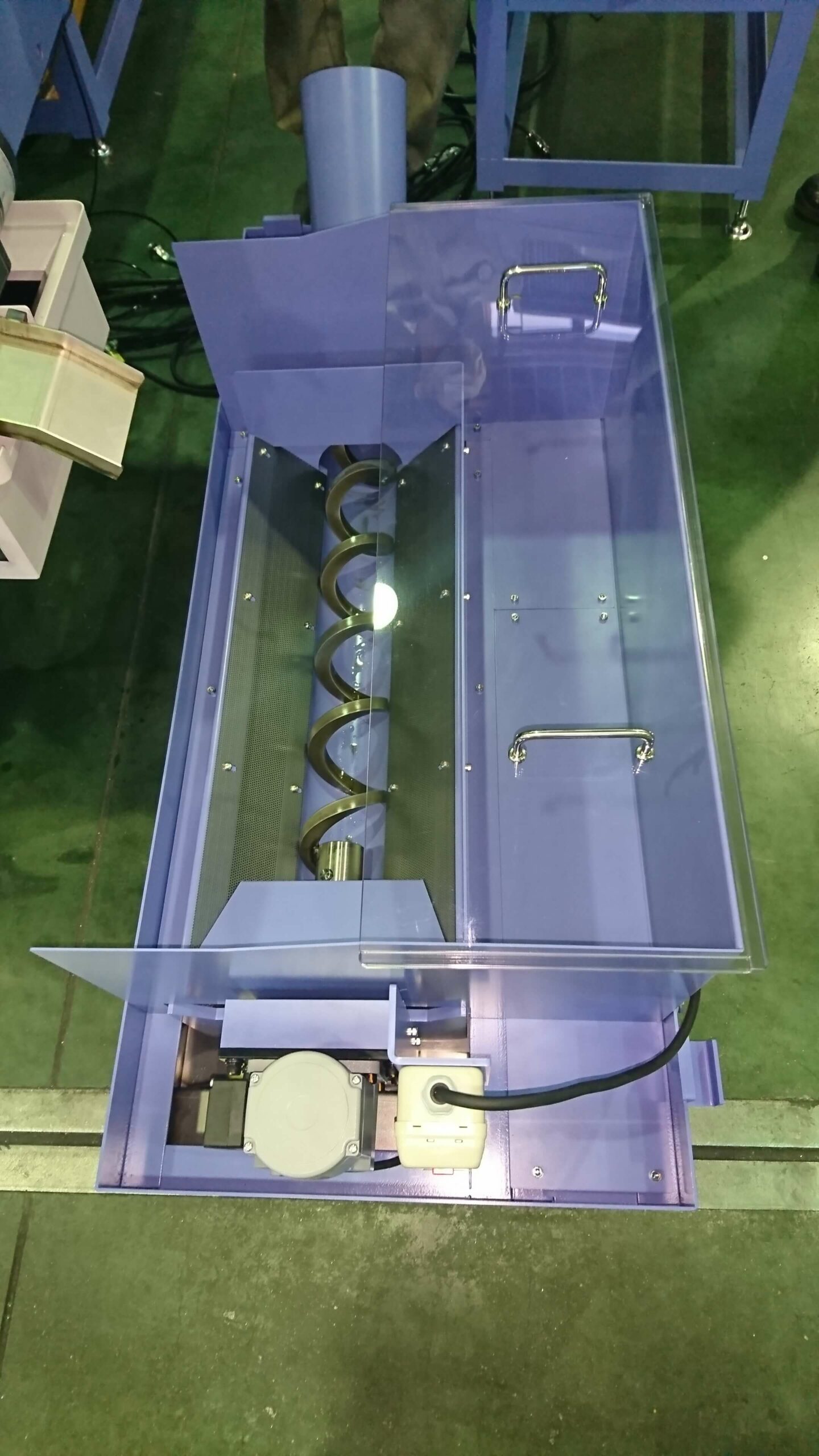
機ロボ一体で復元性や位置精度を確保
機械脚部より多関節ロボットを固定し、安定した精度を確保
納入や移設後の復元が早くできます。
| 項目 | NUCROBO-101 | 単位 | |
|---|---|---|---|
| 加工範囲 | ベット上の振り | 350 | mm |
| 横送り台上の振り | 200 | mm | |
| 主軸 | 回転数変換数 | 無段S4桁 直接指令 | |
| 回転速度 | Max. 6,000 | min-1 | |
| 主軸端形状 | EDA-10コレットタイプ | ||
| 切削台 | 移動量X軸 | 260 | mm |
| 移動量Z軸 | 300 | mm | |
| 早送り速度X軸 | 15 | m/min | |
| 早送り速度Z軸 | 15 | m/min | |
| 制御方式 | 1umクローズドループ(X軸) | ||
| ジョグ送り速度 | 0~1,287 | mm/min | |
| 工具本数 | ワーク形状による | ||
| 刃物台形式 | くし刃型 | ||
| 電動機 | 駆動方式 | ベルト駆動 | |
| 出力 | 3.7/2.2(30分/連続) | KW | |
| 刃物台X軸 | 1.0 | KW | |
| 刃物台Z軸 | 1.4 | KW | |
| 本体情報
※1 NUCシリーズ機械単体仕様となり、追加電源/ロボット稼働範囲や安全柵、付属仕様の重量は含まれておりません。 |
電源電力 | 9.7 | KVA |
| 床面から主軸中心までの高さ | 1,020 | mm | |
| 機械高さ | 1,645 ※1 | mm | |
| 所要床面の大きさ(幅×奥行) | 1,675×1,500 ※1 | mm | |
| 機械重量 | 1,200 ※1 | Kg | |
| 制御装置 | FANUC System Oi-TF PLUS | ||
ロボットタイプ(垂直多関節ロボット)
エグロは1980年代からロボットによる自動化に積極的に取り組み、長年の実績を誇ります。 ラインナップのCNC旋盤に垂直多関節ロボットを搭載し、機ロボ一体でご提案。 一体型にすることで省スペース化が実現。また、ご希望のストッカ装置や安全装置をご提案いたします。 必要に応じてロボット特別教育(教示)まで、ハードとソフト両面で"ロボットが同僚とになる"よう導入をサポートします。
※1 NUCシリーズ機械単体仕様となり、ロボット稼働範囲/安全柵/周辺装置などのサイズや重量は含まれておりません。
| 機種名 | 回転数(min-1) | ストローク X軸/Z軸(mm) | 機械サイズ(mm) 幅×奥行×高さ | 質量(kg) |
|---|---|---|---|---|
| 6,000 | 270/270 | 1,685x1,570x1,500 | 2,000 | |
| 6,000 | 420/390 | 2,025×1,870×1,645 | 2,200 | |
| 4,500 | 230/250 | 2,150×1,500×2,050 | 1,200 |